Base isolator hysteresis
Digitized HDR loops at four strain levels; extraction of \(K_1\), \(K_2\), \(\zeta_{\mathrm{eff}}\), and dissipated energy per cycle; parameter trends versus strain.
Fluid viscous dampers (FVDs) are passive devices that add supplemental damping with little change in effective stiffness, which makes them attractive for retrofit. Their force–velocity relation is commonly written as $P = C|v|^\alpha\,\mathrm{sgn}(v)$, where $P$ is damper force, $v$ is relative velocity, $C$ is the damping coefficient, and $\alpha$ is the velocity exponent ($\alpha=1$ gives a linear FVD).
This term project evaluates longitudinal FVD retrofit of the Bill Emerson Memorial Bridge, a cable-stayed crossing near the New Madrid Seismic Zone. A Midas Civil model (beams and plates with shear deformation) is subjected to nonlinear response history analysis (NLRHA) under six representative ground motions, comparing the as-built bridge with retrofitted cases. The base nonlinear retrofit uses ten longitudinal dampers with $C = 4426\,\mathrm{kN}(s/m)^{0.40}$ and $\alpha = 0.40$; lower- and upper-bound capacities ($C = 2725$ and $11000\,\mathrm{kN}(s/m)^{0.40}$) test sensitivity, and a linear equivalent ($\alpha = 1$, $C = 7650\,\mathrm{kN\,s/m}$) matches the nonlinear device energy per cycle. Demands tracked include east-abutment longitudinal displacement and acceleration, tower-base overturning moment and shear, and tower-beam transverse shear.
FVDs substantially reduced longitudinal displacement, abutment acceleration, and tower overturning moment. Base shear and tower shear did not decrease uniformly—demand redistribution through cable–tower coupling suggests that a longitudinal-only retrofit may need complementary transverse damping. The bounding study shows the same trend: higher damper capacity further reduces displacement and acceleration while shear reductions remain limited. The equivalent linear damper generally increased the quantities it was meant to control. Even when a lower-intensity record produced slightly higher peaks after retrofit, those peaks remained far below MCER-level demands.
If the embed does not render in your browser, open the file directly: CE223 Term Project PDF.
The work collected here follows a deliberate path from device characterization to system-level response history. We first infer equivalent properties from measured isolation hysteresis, then implement and verify MDOF time-integration schemes, and finally move to nonlinear isolation and supplemental damping on realistic structural models. Each interactive dashboard keeps the governing equations, numerical procedure, and demand interpretation in one place so the reader can move from model setup to engineering conclusion without switching contexts.
The homework blocks below build the tools used in the term project: equivalent linearization and FFT checks (Section A), direct and modal Newmark integration with RSA comparison (Section B), and nonlinear FPS modeling with floor spectra for nonstructural components (Section C). The term-project report above applies similar response-history thinking to bridge-scale FVD retrofit.
Notation: SDOF single-degree-of-freedom; MDOF multi-degree-of-freedom; RSA response spectrum analysis; SRSS square-root-of-sum-of-squares; NLRHA nonlinear response history analysis; FVD fluid viscous damper; FPS friction pendulum system; HDR high-damping rubber.
HW5 develops the linear theory side of base isolation: modal properties of the isolated system, response-history displacement and force demands, and comparison against spectrum-based estimates. The report documents model idealization, damping assumptions, and how modal superposition and RSA are used as checks on direct integration—not as substitutes for verifying the time-history solution.
Read the embedded report for the full derivation and numerical results, then use the Section A dashboards to inspect the underlying hysteresis-to-SDOF workflow that motivates the isolated-system parameters.
If the embed does not render in your browser, open the file directly: CE223 HW5 PDF.
Before analyzing an isolated building, we need equivalent properties for the isolation hardware itself. Section A starts from digitized force–displacement loops of high-damping rubber (HDR) bearings tested at several shear strains. From each loop we recover storage stiffness \(K_1\), loss stiffness \(K_2\), and an equivalent viscous damping ratio \(\zeta_\mathrm{eff}\). Those quantities enter a four-bearing SDOF idealization; a fixed-point iteration updates strain and \(\zeta_\mathrm{eff}\) until the assumed and computed values agree.
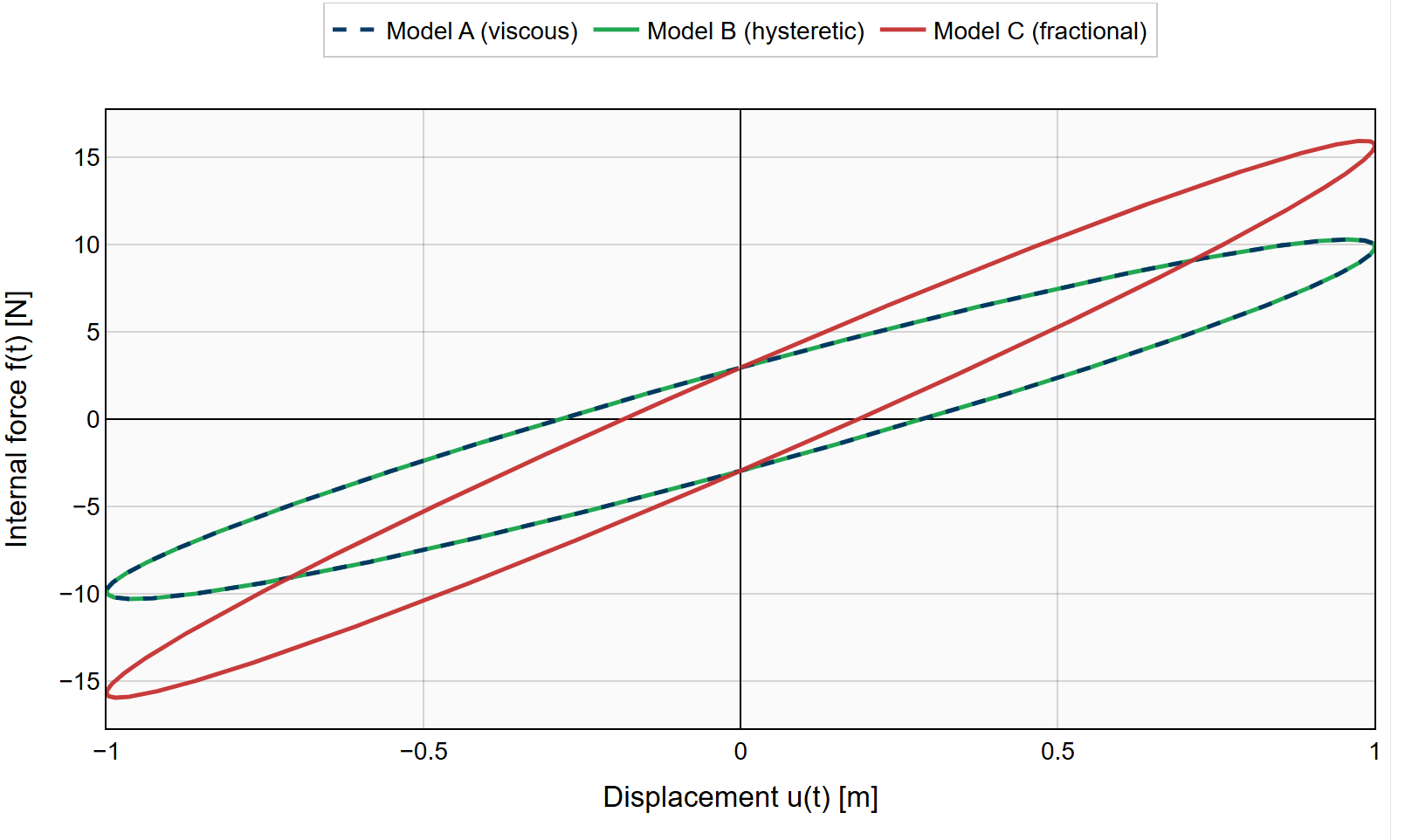
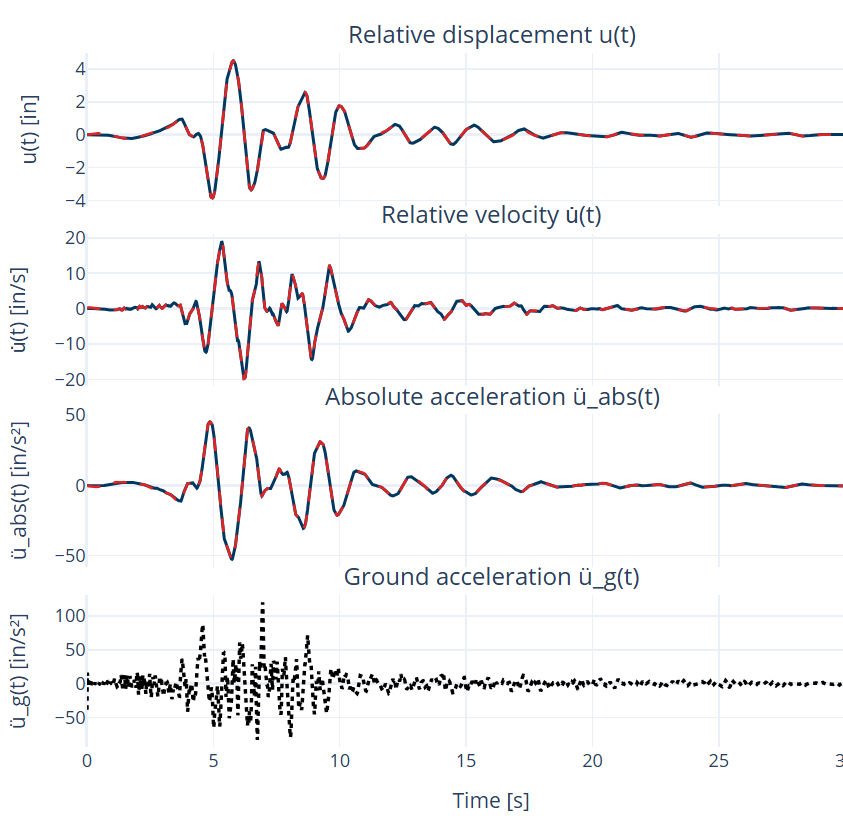
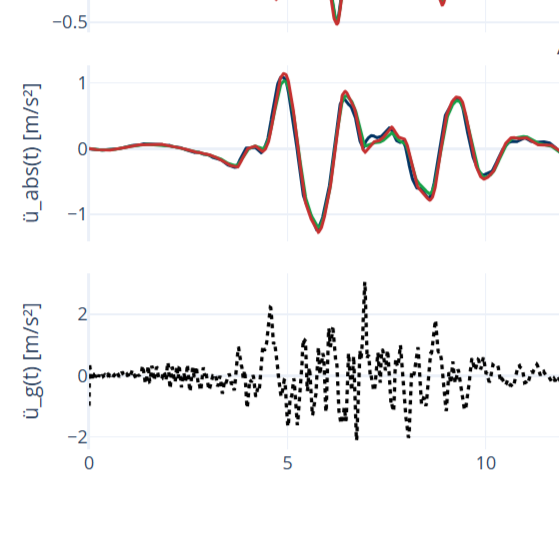
The same SDOF is then driven by the Kobe University 090 component in the time domain (Newmark) and frequency domain (FFT), and alternative damping laws—viscous, hysteretic, and fractional Kelvin–Voigt—are compared on identical inputs. That sequence answers two practical questions: whether the equivalent parameters are consistent with the measured loops, and whether a simple SDOF with those parameters reproduces the salient features of the recorded motion.
Digitized HDR loops at four strain levels; extraction of \(K_1\), \(K_2\), \(\zeta_{\mathrm{eff}}\), and dissipated energy per cycle; parameter trends versus strain.
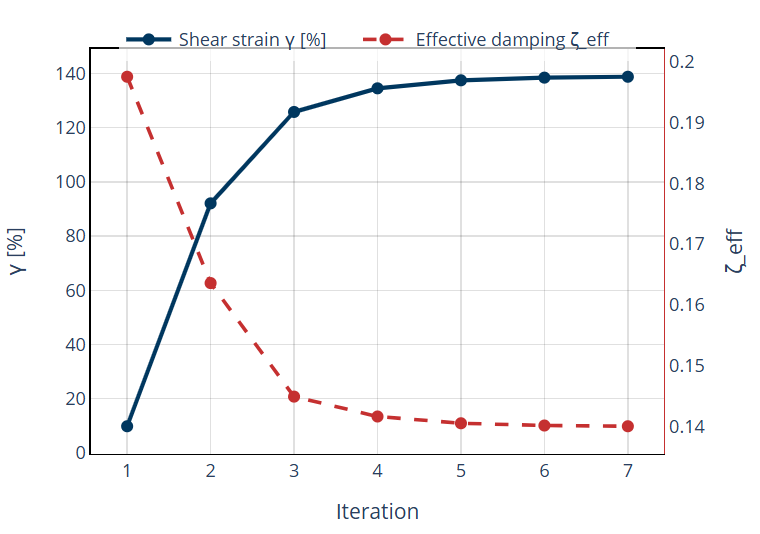
Four-bearing SDOF with \(k = 4K_1\); fixed-point convergence on strain and \(\zeta_{\mathrm{eff}}\); Newmark vs FFT response under Kobe KBU090.
Three damping formulations (viscous, hysteretic, fractional Kelvin–Voigt): hysteresis loops, \(K_1(\omega)\) and \(K_2(\omega)\), and frequency-domain earthquake response.
Section B shifts from SDOF hardware characterization to matrix-based building models. The first dashboard implements constant-average-acceleration Newmark integration for a 2-DOF shear frame with non-classical damping—damping that cannot be written as \(\alpha\mathbf{M}+\beta\mathbf{K}\). That matters because proportional damping would let us decouple the equations exactly; here we compare the direct MDOF solution against a modal approximation and see where the approximation holds and where phase and amplitude error grow.
The second dashboard applies the same integration framework to a 2-DOF base-isolated building under Kobe KBU090. Direct Newmark histories are compared with modal time histories and with RSA peak estimates combined by SRSS. The point is not only to compute drift and isolator displacement, but to show when spectrum analysis is adequate for design checks and when full time history is required.
2-DOF shear frame with non-classical damping; direct Newmark MDOF integration compared with modal superposition.
Base-isolated 2-DOF building under Kobe KBU090; Newmark, modal time history, and RSA+SRSS compared for drift, isolator displacement, and base shear.
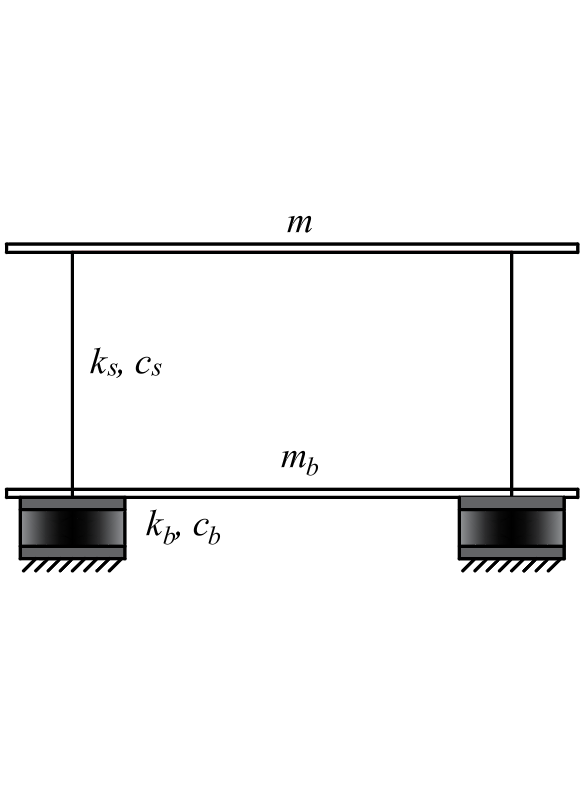
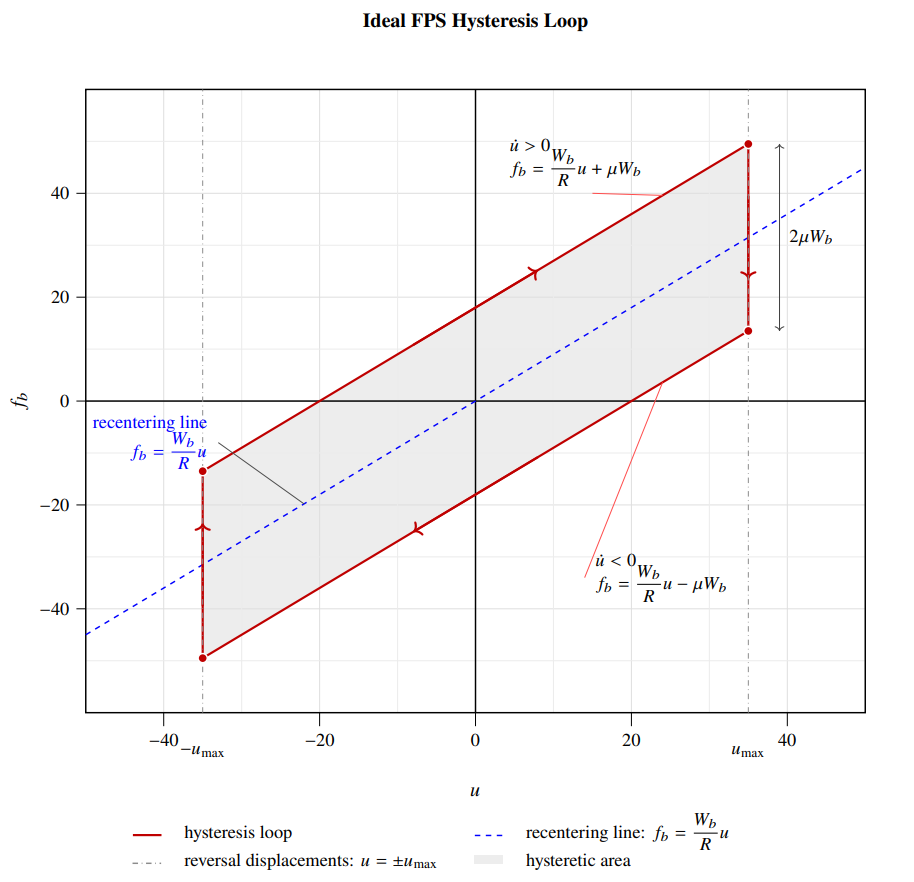
Section C addresses a limitation of linearized isolation design: friction-pendulum (FPS) bearings are inherently nonlinear. A rigid superstructure on bilinear-regularized FPS isolators is integrated with nonlinear Newmark, using return mapping for the isolator state and an algorithmic tangent in the equilibrium iterations. An equivalent linear support model—iteratively calibrated on secant stiffness and energy dissipation per cycle—is run on the same ground motions (Kobe and Sylmar) so peak displacements, forces, and hysteresis can be compared directly.
Absolute floor accelerations from both analyses feed floor spectra for nonstructural components at \(\zeta_p = 2\%\) over a wide period range. That step tests whether equivalent linearization preserves acceleration-sensitive demands in the short-period band, where NSC damage is often controlled.
Nonlinear FPS with return-mapping Newmark; energy-equivalent linear benchmark; Kobe and Sylmar hysteresis and peaks; NSC floor spectra from absolute floor acceleration.
Companion course pages cover structural dynamics fundamentals, nonlinear analysis, and the numerical methods referenced in the dashboards above.